Abstract
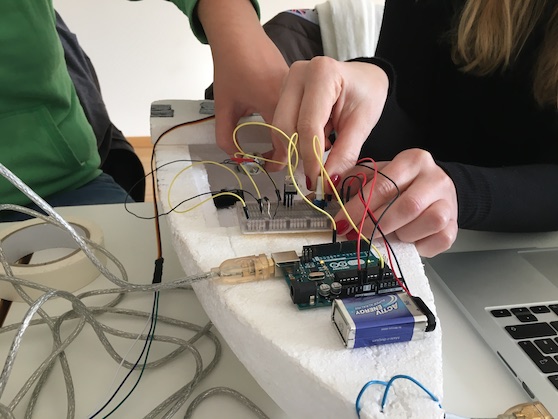
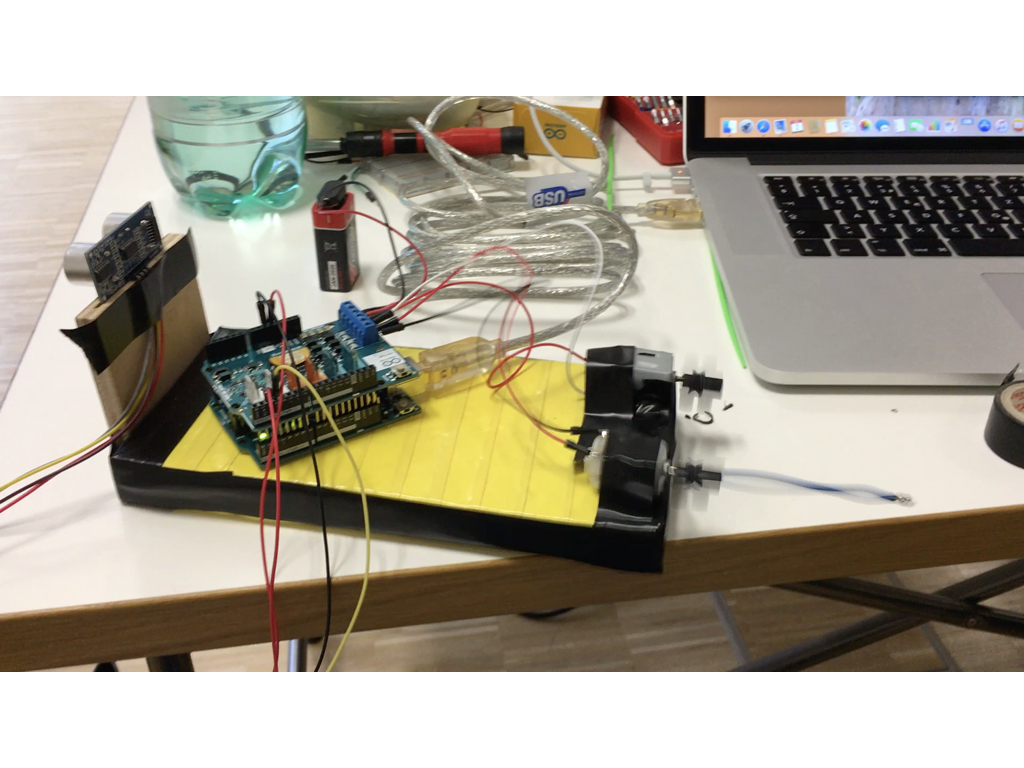
Das Boot entstand im Rahmen eines Studienprojektes. Das autonom fahrende Wasserfahrzeug wurde mit drei Sensoren und Aktoren ausgestattet. Ziel war es ein smartes Boot zu gestalten, das Hindernisse erkennt und diesen eigenständig ausweichen kann.